
Если вы хоть раз теряли дрон в высокой траве, за лесополосой или ловили «фейлсейф» на дальности — вы наверняка задумывались о GPS-модуле. На FPV-сцене вокруг него до сих пор много мифов: одни считают его обязательным, другие — лишним грузом, третьи путают GPS с радиолинком и ждут от него того, чего он делать не умеет. В этой статье разберём по порядку: зачем GPS-модуль нужен на FPV-дроне, как именно работает функция Return-to-Home (RTH), и почему GPS — это вообще не замена радиоприёмнику, а совершенно другое звено в системе.
Что такое GPS-модуль и какие данные он даёт полётному контроллеру
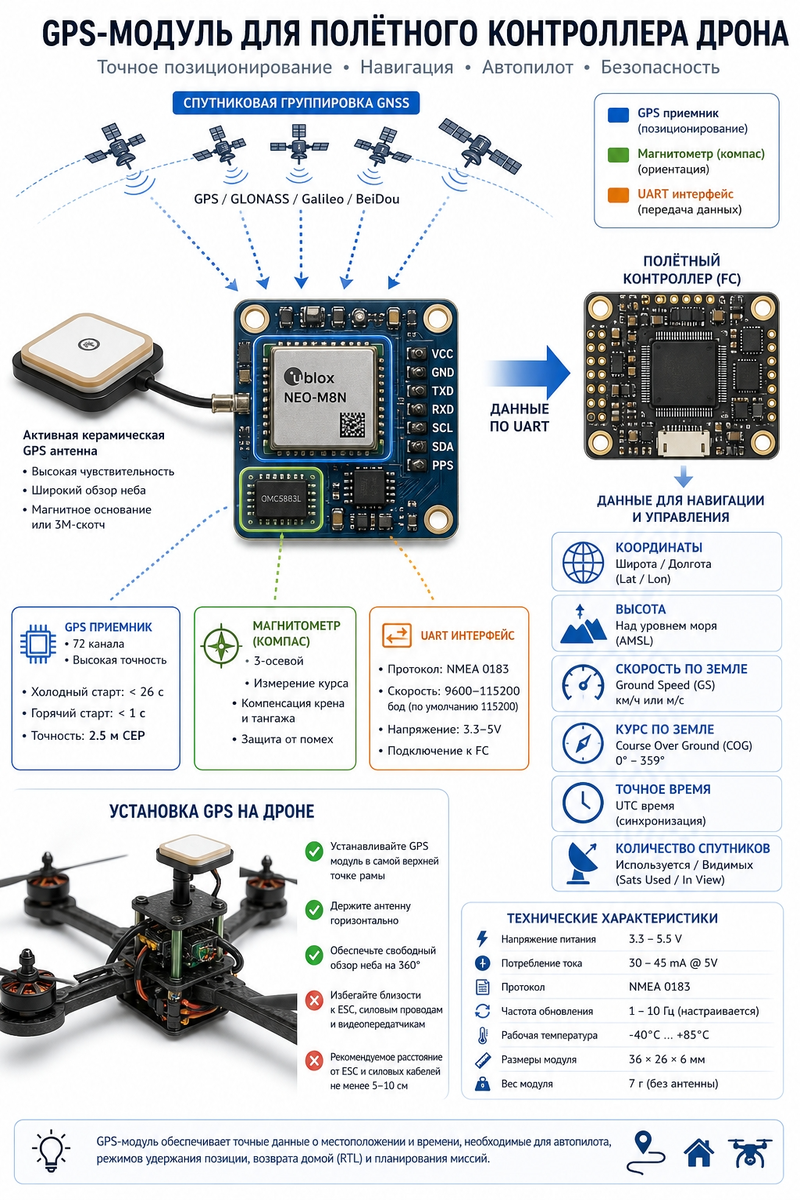
GPS-модуль на дроне — это небольшая плата с антенной и приёмником сигналов глобальных навигационных спутниковых систем. Современные модули давно работают не только с американской GPS, но и с ГЛОНАСС, Galileo, BeiDou — то есть фактически это GNSS-приёмник, хотя в обиходе все называют его «GPS-модулем».
Что он даёт полётному контроллеру: координаты широты и долготы, высоту над уровнем моря, путевую скорость, курс над землёй (course over ground — направление фактического движения относительно поверхности), точное время и количество захваченных спутников. Здесь сразу стоит отметить важную деталь: курс над землёй — это не то же самое, что направление, куда смотрит «нос» дрона. Если квадрокоптер висит на месте или его сносит ветром, GPS-курс и курс по компасу будут расходиться — и именно поэтому магнитометр на борту необходим, без него RTH не сможет правильно сориентировать дрон в момент старта возврата.
Часто в одном корпусе с GNSS-чипом стоит ещё и магнитометр (компас) — он подсказывает контроллеру, куда именно повернут «нос» дрона, когда квадрокоптер висит на месте и не движется. Кстати, компас неслучайно выносят именно в GPS-модуль: магнитометр очень чувствителен к помехам от силовых проводов и регуляторов, поэтому его поднимают на стойке вверх, подальше от ESC и токовых линий, — и заодно ставят рядом с GPS-антенной, которой тоже нужно «чистое небо».
Вся эта информация поступает в полётный контроллер по шине UART (обычно по протоколу UBX или NMEA) и используется для самых разных функций — от простой телеметрии «сколько спутников и какая скорость» до полноценных автономных режимов полёта.
Готовый GPS-модуль для самостоятельной сборки или замены можно посмотреть в нашем каталоге GPS-модулей — он подходит для большинства современных FPV-сборок на Betaflight, INAV и аналогах.
Зачем GPS-модуль нужен именно на FPV-дроне
В классическом «фристайл»-FPV пилот видит картинку с курсовой камеры и управляет дроном вручную, поэтому навигация по спутникам там вроде бы не нужна. Но на практике GPS решает несколько очень болезненных задач.
Во-первых, это телеметрия дальности и скорости. Модуль показывает реальную скорость относительно земли (а не воздушную), расстояние до точки взлёта и направление на «дом». На лонг-рейндже это критично: вы всегда понимаете, сколько ещё можно пролететь и хватит ли батареи на возврат.
Во-вторых, поиск упавшего дрона. Даже если связь и видео потеряны, последние полученные координаты остаются в логах OSD или в приложении передатчика. Без GPS поиск дрона в поле или в лесу превращается в лотерею; с GPS — это просто прогулка по координатам в навигаторе.
В-третьих, автоматические режимы полёта. На прошивках вроде INAV, Ardupilot или в полётниках цифровых систем GPS включает Position Hold (удержание точки в пространстве при отпущенных стиках), Altitude Hold с привязкой к спутникам, полёт по точкам и, главное для FPV, — Return-to-Home.
В-четвёртых, безопасность для длинных миссий и съёмки. Если вы летаете на лонг-рейндж-сетапе с модулем вроде TBS Crossfire Long Range или более компактного TBS Crossfire TX Lite, полёт без GPS — это игра в рулетку. Такие радиолинки при правильных антеннах и рельефе уверенно работают на больших расстояниях, но без координат в случае фейлсейфа дрон превращается в потерянный груз.
Как на самом деле работает Return-to-Home
Вокруг RTH у новичков много магического мышления: «нажал кнопку — дрон сам прилетит». На деле это вполне понятная цепочка событий, и понимать её важно, чтобы не разочароваться в самый ответственный момент.
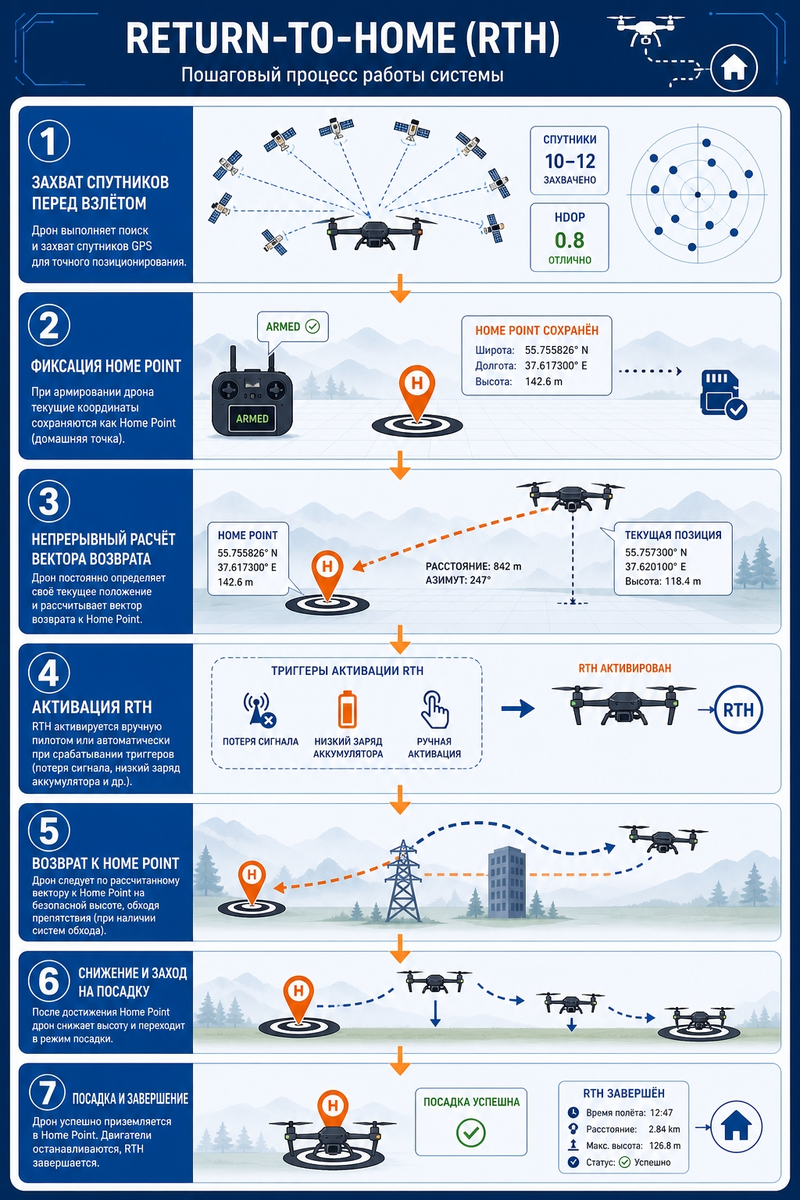
Если разложить RTH на шаги, выглядит он так:
- Захват спутников перед взлётом. Пилот ждёт «лока» и приемлемого HDOP (показатель геометрической точности; чем ниже, тем лучше — ориентир около 1,5–2,0). Конкретное число спутников — это вопрос настройки прошивки: в INAV и Ardupilot минимальный порог для арминга и фиксации Home Point задаётся вручную, многие пилоты ставят 6–8 как абсолютный минимум и по факту ждут 10–12 как «комфортного» уровня. Без приемлемого лока следующий шаг невозможен.
- Фиксация Home Point. В момент арминга полётный контроллер запоминает текущие координаты, высоту и курс по компасу как «точку дома». Если взлететь без лока, точки «дома» просто не существует — и RTH работать не будет, каким бы дорогим ни был модуль.
- Постоянный расчёт вектора возврата. Во время полёта контроллер сравнивает текущие координаты с домашними и считает азимут и расстояние до точки старта.
- Срабатывание триггера. RTH запускается либо вручную с переключателя на пульте, либо автоматически — по фейлсейфу: потеря связи с приёмником, низкое напряжение батареи, выход за geofence.
- Набор безопасной высоты. Дрон поднимается до заранее заданной высоты возврата (обычно 30–50 метров — выше деревьев, проводов и крыш на маршруте).
- Разворот и полёт по прямой. Нос дрона разворачивается к дому, и квадрокоптер летит по прямой к точке старта.
- Снижение и посадка. Над домом дрон либо зависает, либо снижается и садится — это зависит от настроек прошивки.

Здесь важно понимать ограничения. RTH не видит препятствий: если между дроном и домом стоит здание, дерево или ЛЭП ниже заданной высоты возврата — дрон в них врежется. Высота возврата должна быть выше всего, что есть на маршруте. Компас должен быть откалиброван, иначе на старте полёта дрон полетит «домой» в неправильном направлении. И запас батареи на возврат нужно считать заранее — RTH не умеет телепортироваться, ему нужно физически долететь обратно.
В FPV-прошивках вроде Betaflight RTH реализован упрощённо (GPS Rescue) и в основном рассчитан на сценарий «верни дрон при потере видео или связи». В INAV и Ardupilot RTH — это полноценная навигационная функция с настройкой профиля возврата, скорости, поведения над точкой и автоматической посадки.
GPS уязвим: про глушение и спуфинг
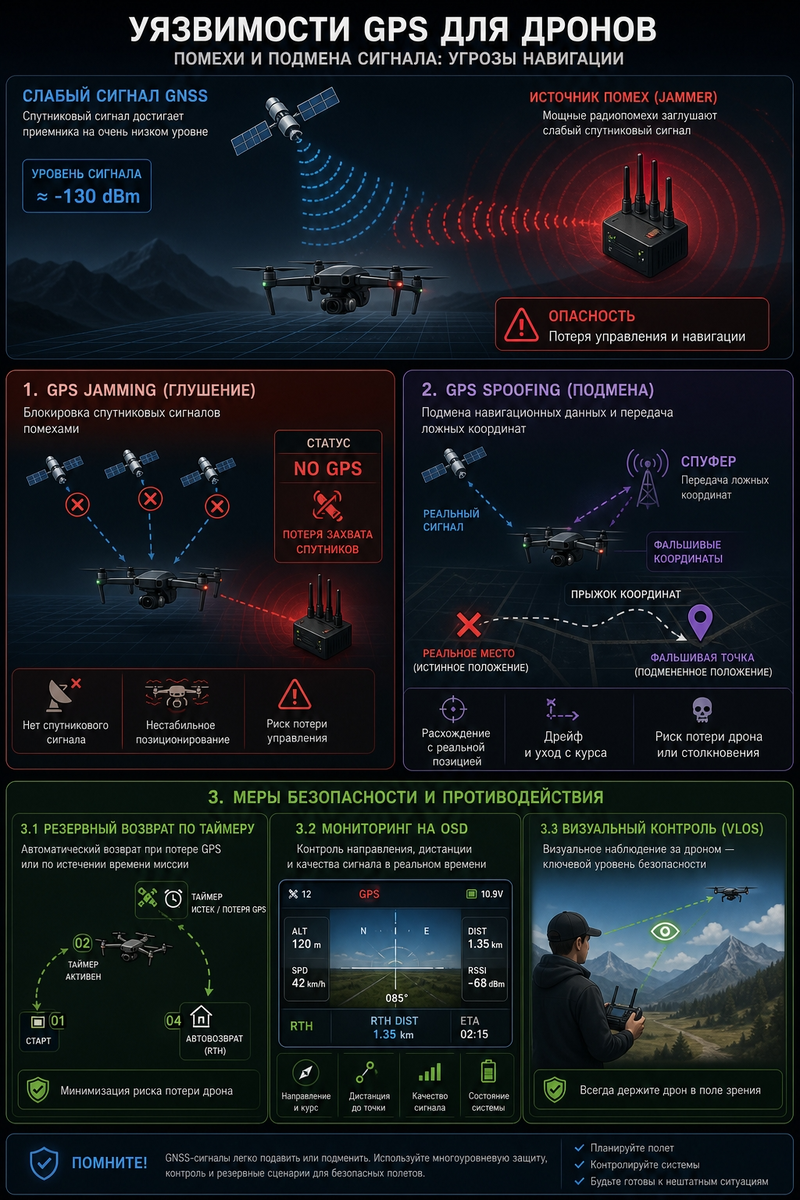
Об этом нужно сказать отдельно, потому что в 2024–2026 годах ситуация с GPS существенно изменилась. Сигнал GNSS-спутников очень слабый — он приходит на землю с мощностью порядка минус 130 дБм, и заглушить его технически несложно. В приграничных регионах, рядом с крупными инфраструктурными объектами, в зонах активной работы РЭБ и иногда просто над большими городами «лок» может пропадать или, что хуже, подменяться: дрон считает, что он находится совсем не там, где он на самом деле. Это называется спуфинг.
Практический вывод простой: RTH — это полезная страховка, но не единственная. В зонах с возможными помехами нужен план Б. Это значит — таймер на возврат «по часам», а не только по координатам, постоянный визуальный контакт или OSD-контроль направления и расстояния, и понимание, что в момент потери GPS дрон в режиме возврата может повести себя непредсказуемо. Современные прошивки умеют детектировать резкие «прыжки» координат и игнорировать явный спуфинг, но это не панацея.
Чем GPS-модуль отличается от радиоприёмника
Это, пожалуй, самая частая путаница у тех, кто только собирает свой первый дрон. На борту есть две разные радиосистемы, и они решают совершенно разные задачи.
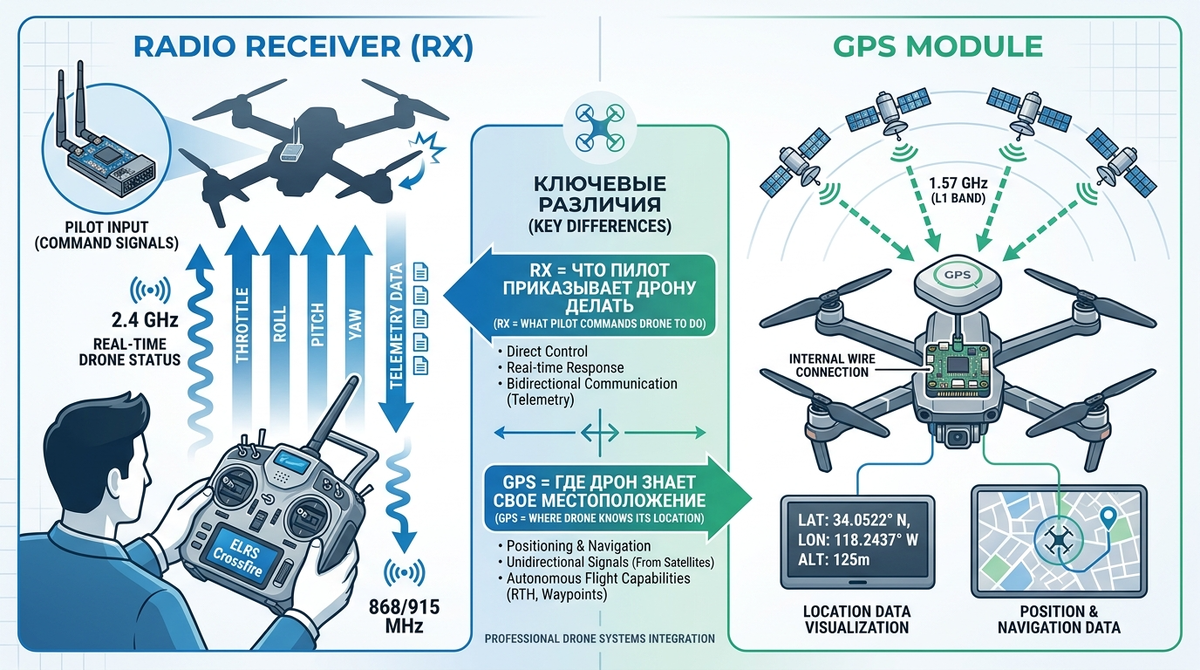
Радиоприёмник (RX) — это часть линка между пультом и дроном. Он принимает команды управления от передатчика на пульте: газ, крен, тангаж, рыскание, переключатели режимов. Работает обычно на частотах 2,4 ГГц или 868/915 МГц — например, ELRS живёт на 2,4 ГГц и 900 МГц, Crossfire — на 868/915 МГц. Без приёмника дрон вообще не управляется — пилот не может ни взлететь, ни сманеврировать. Это двусторонний канал: вверх идут команды, вниз — телеметрия.
GPS-модуль — это односторонний приёмник сигналов от навигационных спутников на частоте около 1,57 ГГц (диапазон L1; современные модули умеют ещё и L5, но в любительском FPV это пока редкость). Он не общается с пультом, не принимает команды и не передаёт ничего наружу. Его единственная задача — определить, где дрон находится в пространстве, и сообщить эту информацию полётному контроллеру по внутренней проводной шине.
Если совсем коротко: радиоприёмник отвечает на вопрос «что пилот хочет, чтобы дрон сделал», а GPS-модуль — на вопрос «где сейчас находится дрон». Одно другое не заменяет и не дублирует. Можно летать без GPS (большинство фристайл-пилотов так и делает), но летать без приёмника физически невозможно. И наоборот: GPS работает даже тогда, когда связь с пультом потеряна — именно поэтому RTH вообще возможен как функция фейлсейфа.
Ещё одно важное отличие — поведение при помехах. Современные радиолинки вроде Crossfire и ELRS на 900 МГц при правильных антеннах и открытой местности уверенно держат связь на больших дистанциях. GPS, наоборот, уязвим: его сигнал слабый, и в городе среди многоэтажек, под мостами или рядом с источниками помех «лок» может теряться. Поэтому хорошее размещение GPS-антенны на раме (сверху, подальше от VTX и силовой проводки) — это половина успеха.
Как выбрать GPS-модуль и собрать надёжную связку
Если вы летаете в чистом поле короткими сессиями и в пределах визуальной видимости — без GPS прожить можно. Но как только речь идёт о лонг-рейндже, съёмке, полётах над лесом, водой, незнакомой местностью или просто о дорогом дроне, который не хочется потерять, — GPS-модуль перестаёт быть «лишним граммом» и становится страховкой, которая окупается с первого же фейлсейфа.
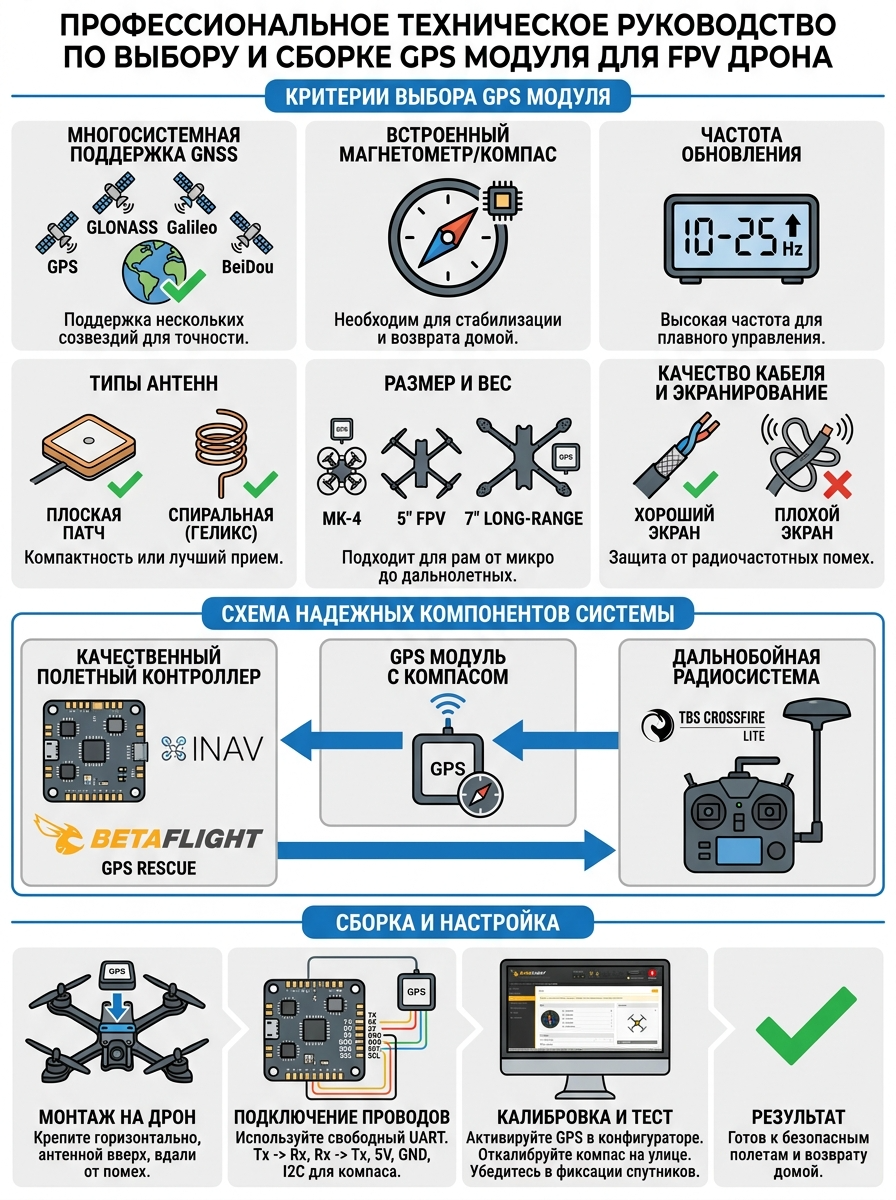
При выборе самого модуля есть смысл смотреть на несколько параметров. Первое — поддержка мульти-GNSS: модуль, который работает одновременно с GPS, ГЛОНАСС, Galileo и BeiDou, ловит лок быстрее и держит его увереннее, особенно в сложных условиях. Второе — наличие встроенного магнитометра: для INAV и Ardupilot компас в составе модуля сильно упрощает сборку и улучшает поведение в Position Hold и RTH. Третье — частота обновления координат: 10 Гц — это разумный минимум, современные модули на чипах u-blox M9/M10 уверенно работают на 18–25 Гц, и для динамичного полёта или возврата на скорости это заметно лучше. Четвёртое — тип антенны и размер: керамические патч-антенны компактны и подходят для большинства задач, хеликс-антенны крупнее, но дают лучший приём в сложной электромагнитной обстановке. Пятое — физический размер и вес: для микро-сборок берут модули поменьше, для 7-дюймовых лонг-рейнджей можно ставить полноразмерные с большой антенной. И шестое, о чём редко пишут: качество кабеля и UART-соединения. Дешёвые модули с тонкими длинными неэкранированными проводами часто ловят помехи от VTX и силовых линий — снаружи всё выглядит исправно, а лок «плавает» или теряется на полном газу. Короткий, аккуратно проложенный и по возможности экранированный кабель — такая же часть надёжности, как и сам чип.
Логичная связка для надёжного дальнего полёта выглядит так: качественный полётный контроллер на INAV или с поддержкой GPS Rescue в Betaflight, дальнобойный радиолинк (например, TBS Crossfire в полной или Lite-версии) и GPS-модуль с встроенным компасом. Все три компонента не конкурируют, а дополняют друг друга: радиолинк даёт управление, GPS — координаты, полётник — «мозги», которые превращают эти данные в безопасный возврат домой.
Перед первым полётом с GPS имеет смысл пройтись по короткому чеклисту: дождаться уверенного захвата спутников и приемлемого HDOP, откалибровать компас именно на месте взлёта (магнитное склонение меняется при перемещении на сотни километров, и компас, откалиброванный дома, в новой локации будет врать), задать высоту возврата выше всех препятствий на маршруте, проверить, что Home Point зафиксировался при арминге, и убедиться, что в настройках фейлсейфа прописан именно RTH, а не «отключить моторы». Эти пять минут проверки экономят и нервы, и стоимость дрона.
Подобрать остальные комплектующие для дрона — рамы, моторы, регуляторы, VTX, антенны — можно в нашем общем каталоге. Если сомневаетесь в совместимости конкретного GPS-модуля с вашим полётным контроллером или прошивкой — напишите нам, поможем подобрать связку под вашу задачу и стиль полётов.
